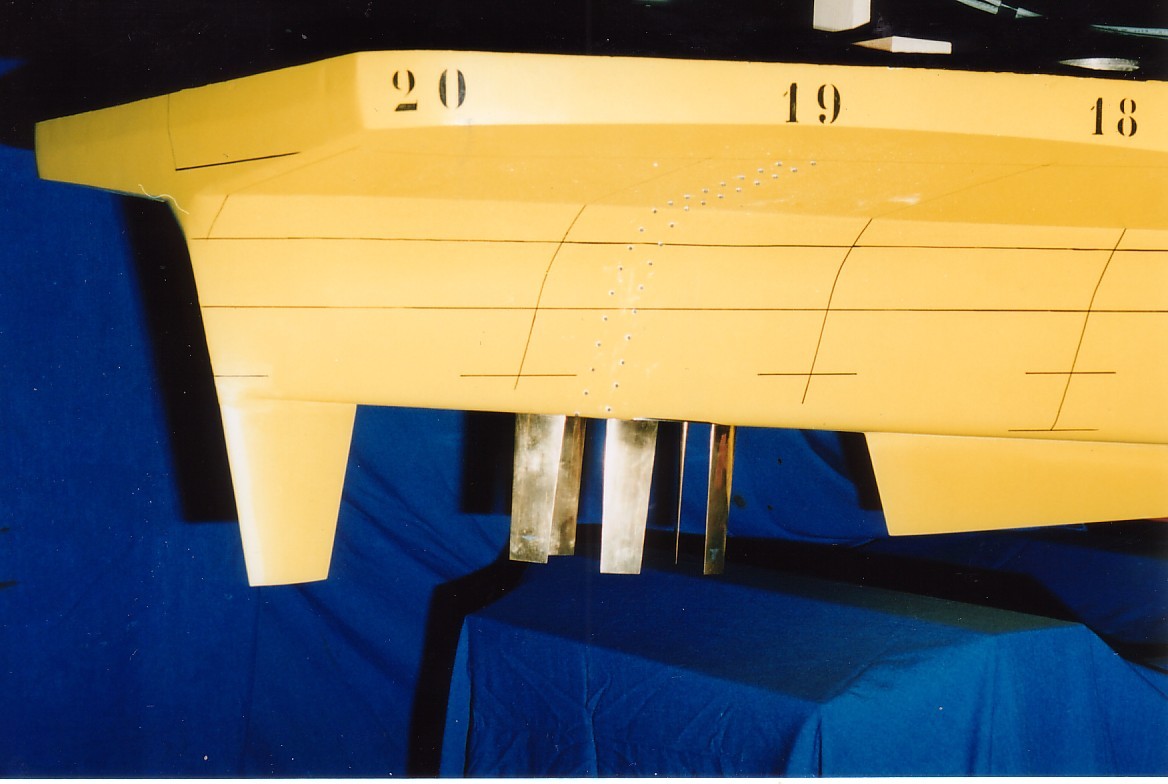
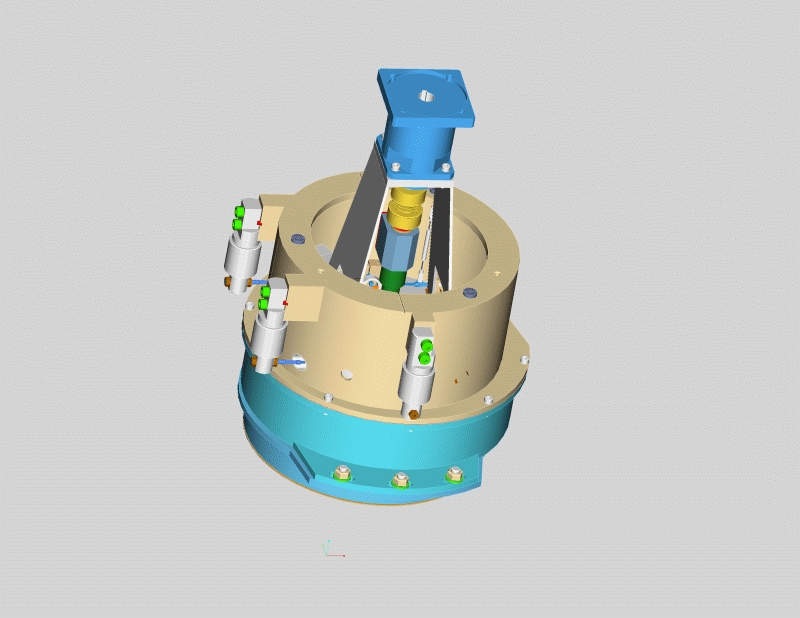
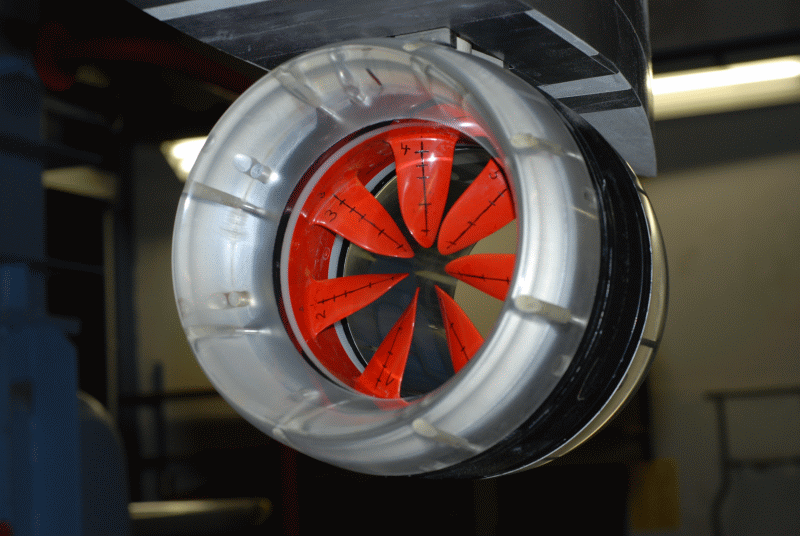
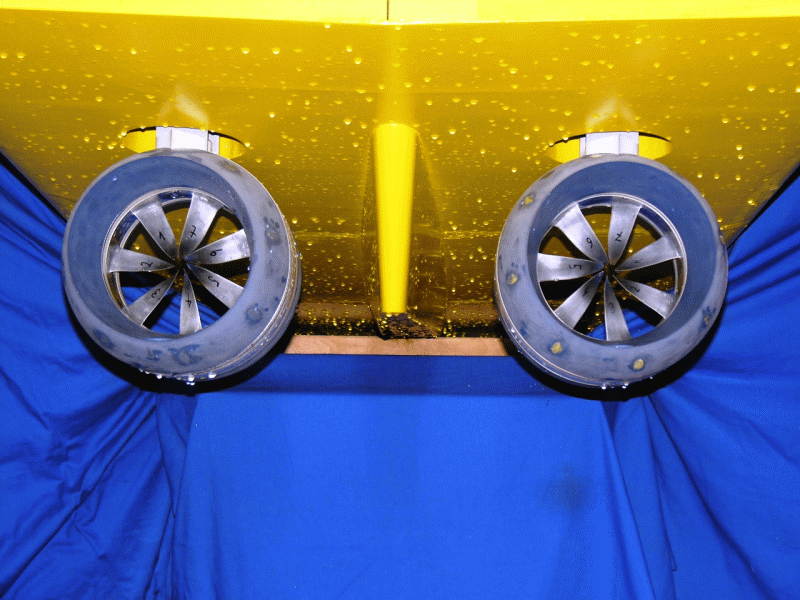
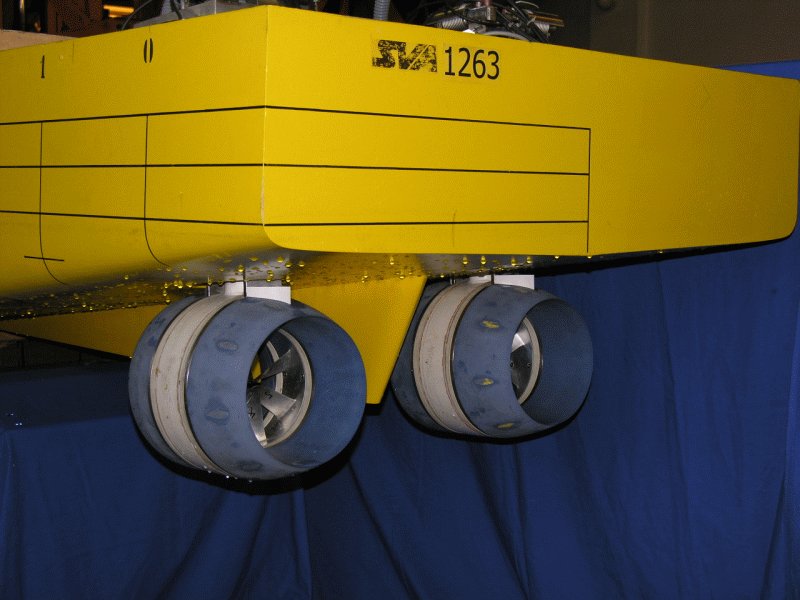
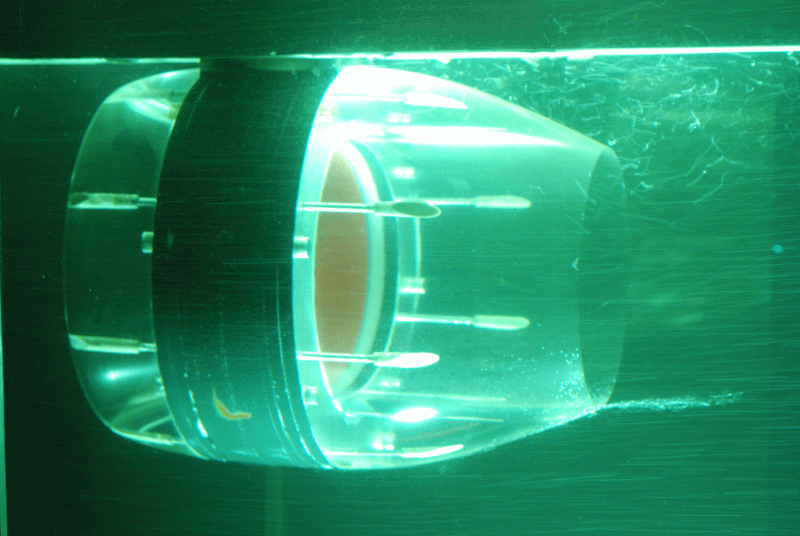
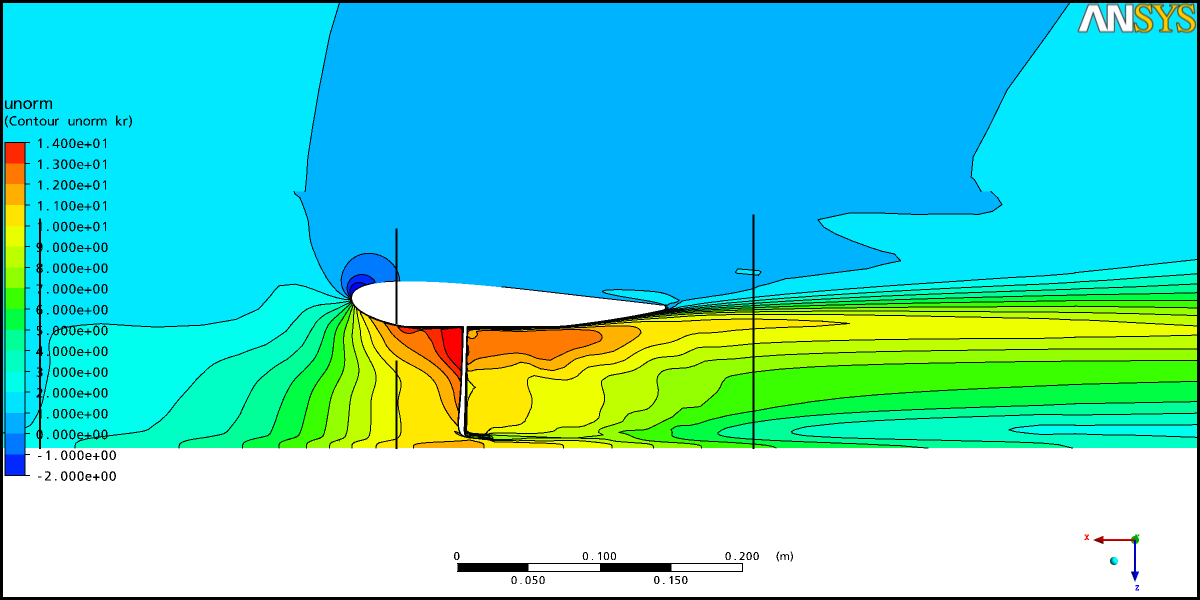
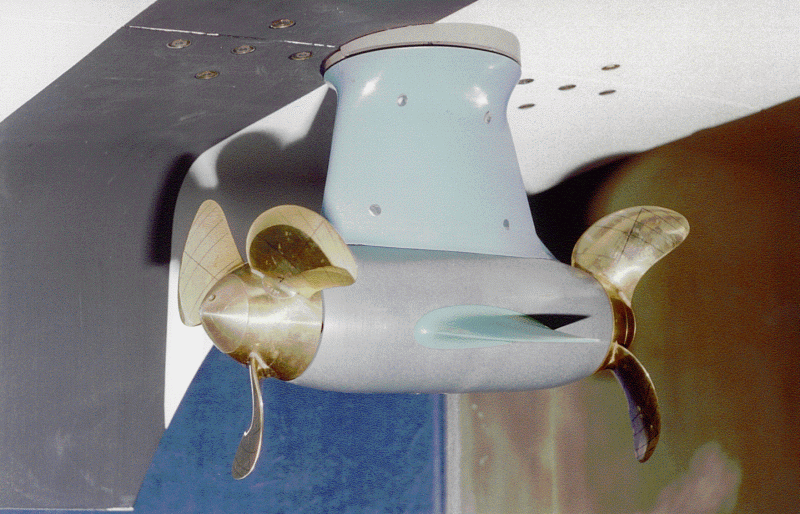
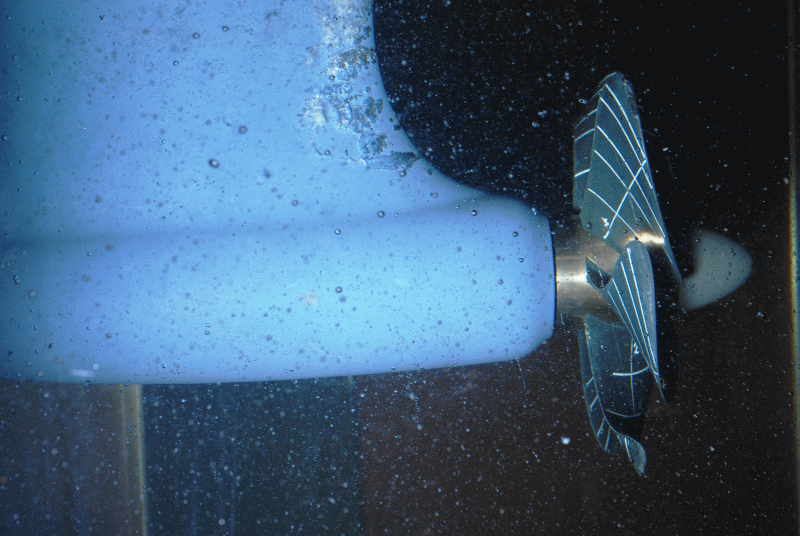
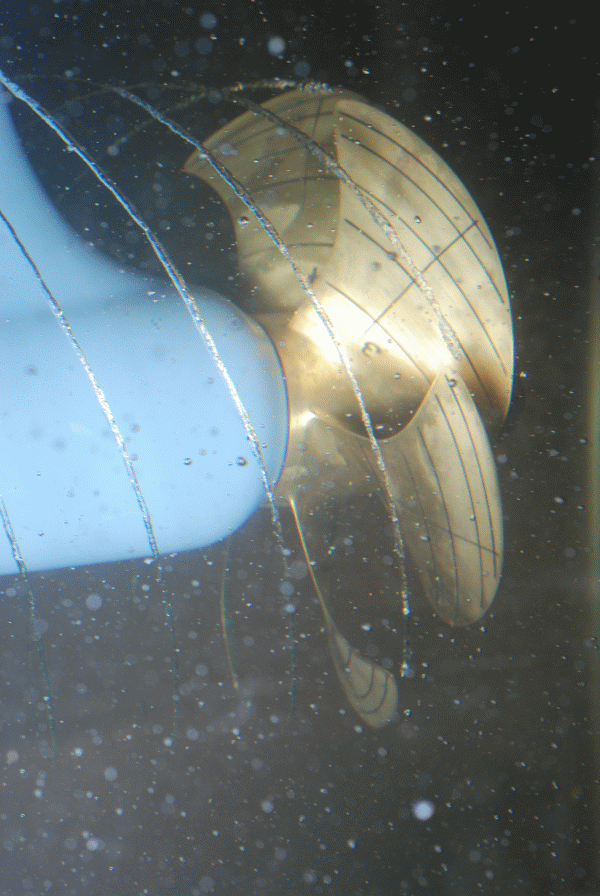
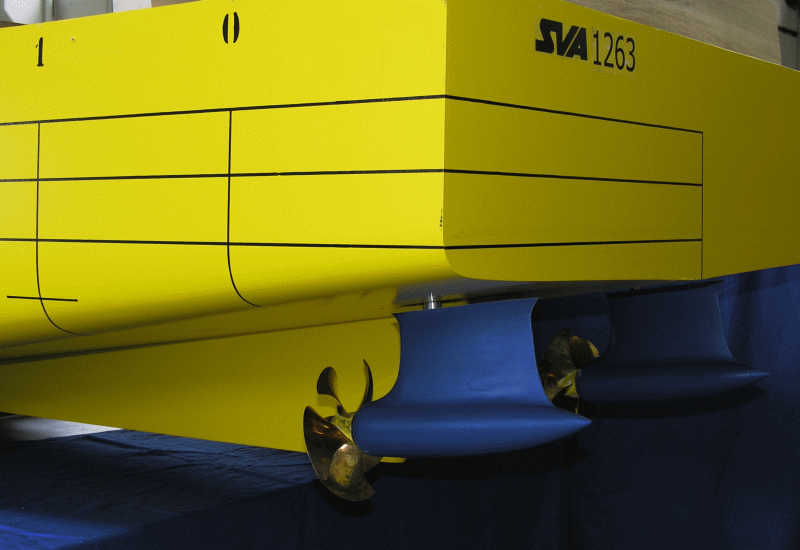
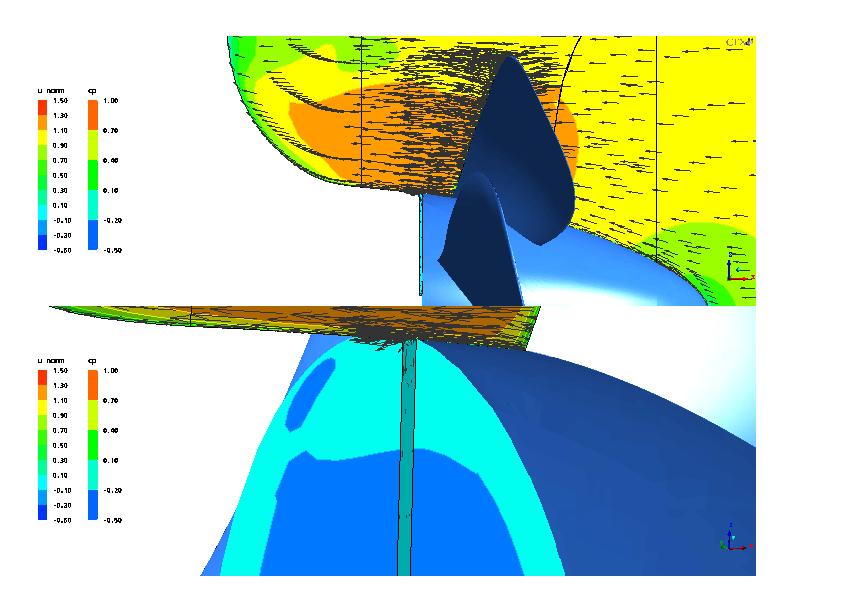
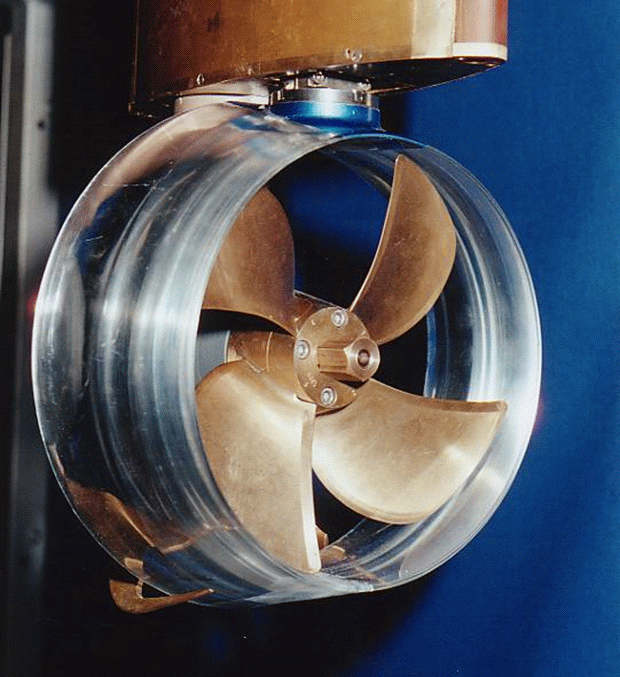
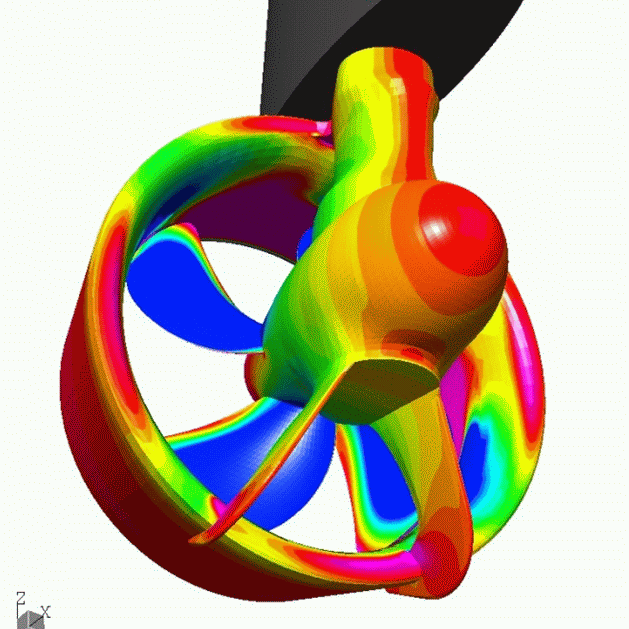
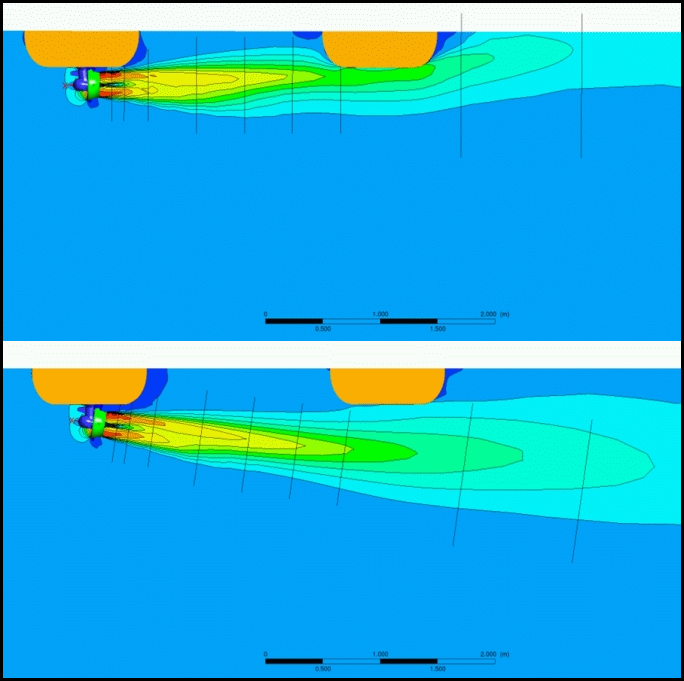
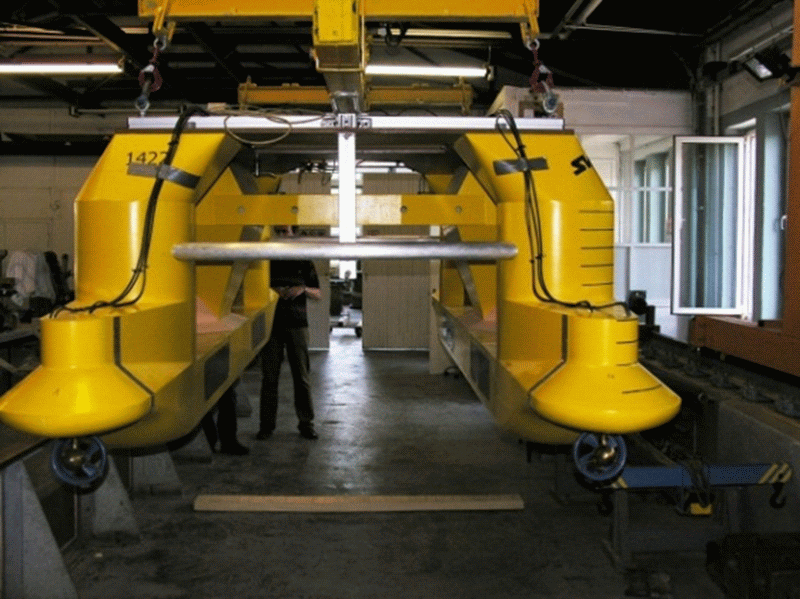
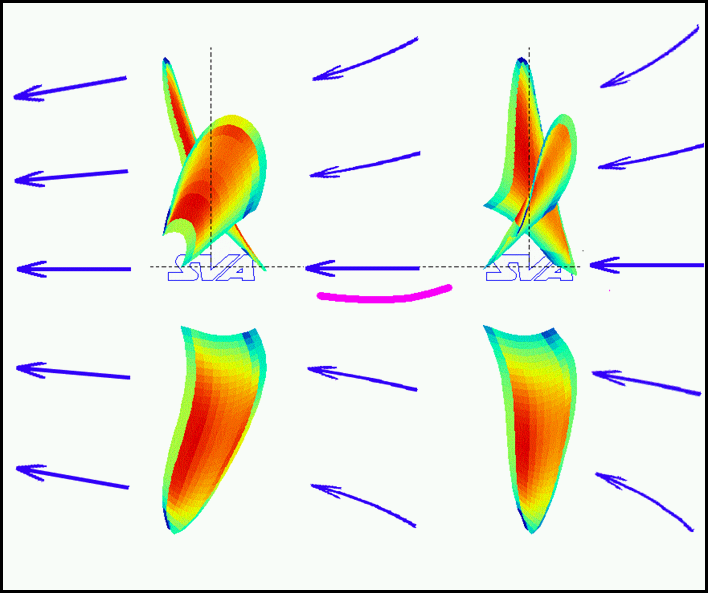
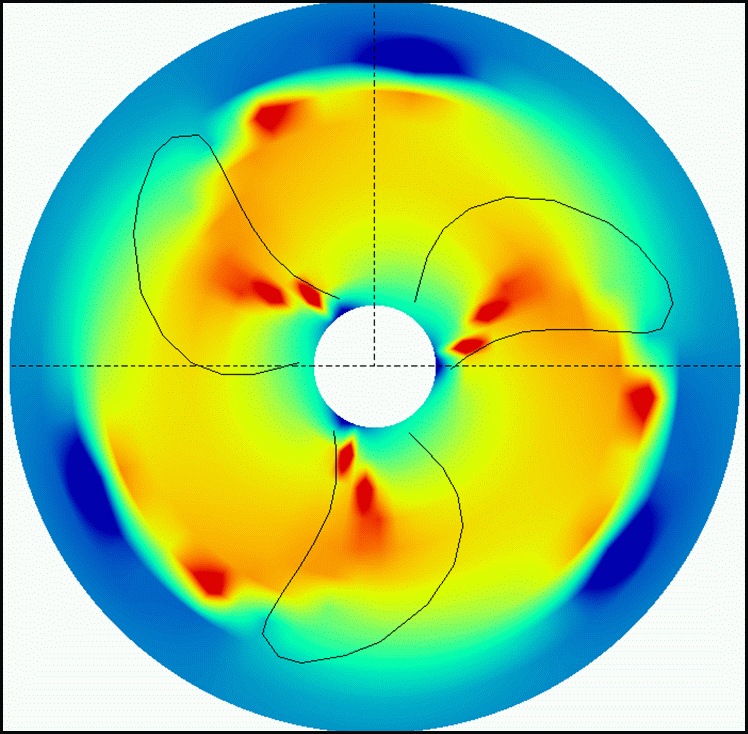
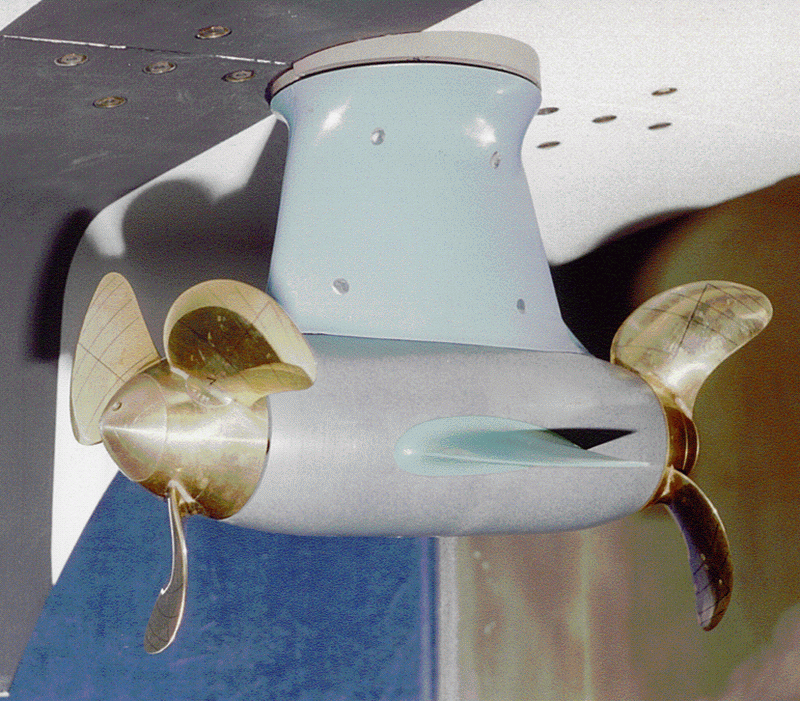
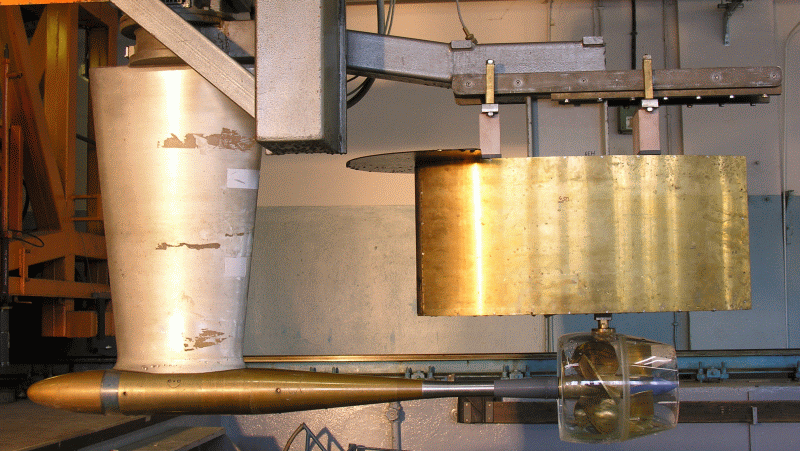
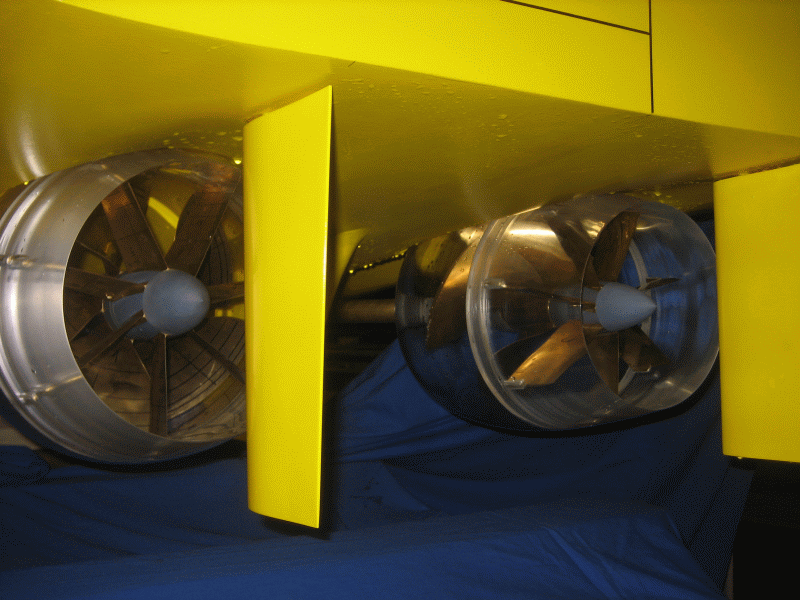
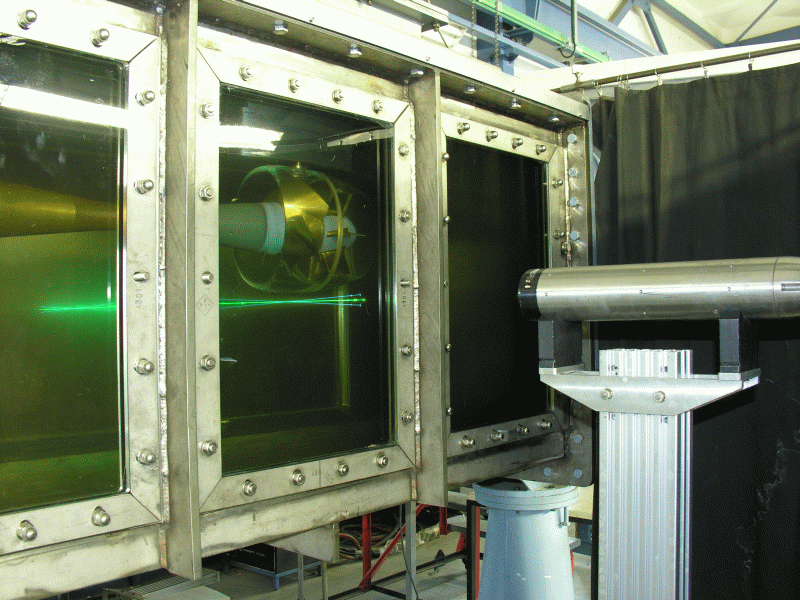
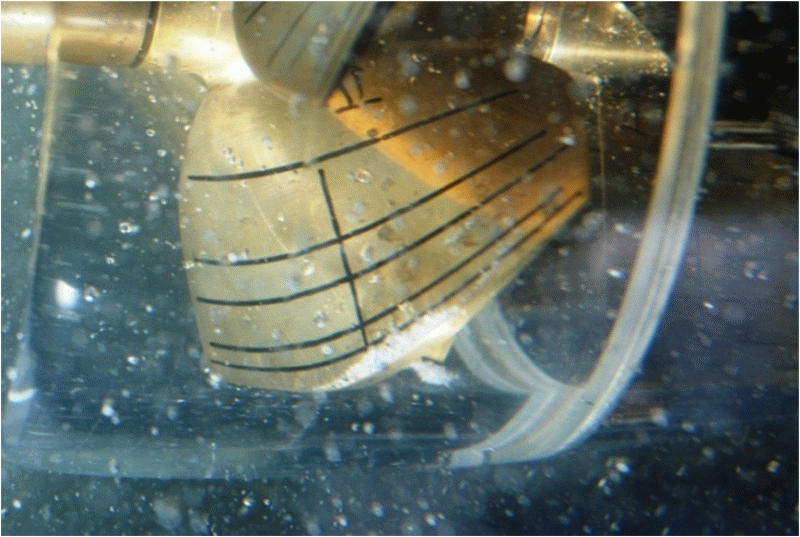
Hauptbestandteile des tiefgetauchten Waterjets (TWJ) sind Rotor, Stator und Düse. Die Kombination von Rotor und Stator gewährleistet einen annähernd drallfreien Strahl (minimale Drallverluste). Durch die Düsengeometrie kann die Geschwindigkeit und der Druck innerhalb des Linearjets beeinflusst werden (Verzögerungsdüse), um das Auftreten von Kavitation zu verringern. Der Linearjet wird unterhalb des Schiffbodens angeordnet. Grundlagenuntersuchungen im FuE-Vorhaben „Entwicklung Linear Jet für Yachten“ [1] zeigten, dass der tiefgetauchte Waterjet ein Propulsionssystem mit einem hohen Wirkungsgrad und guten Kavitationseigenschaften ist und insbesondere für schnelle Schiffe und Schiffe mit Tiefgangsbeschränkungen eingesetzt werden kann. In der SVA wurden im Zeitraum 2000 bis 2005 Studien und Projekte für Schiffe mit tiefgetauchten Waterjets in Zusammenarbeit mit der Industrie und Herstellern von Waterjets durchgeführt. Ende 2005 übernahm Voith Turbo Schneider Propulsion GmbH & Co. KG [4] (VOITH) die Entwicklung und Fertigung des Voith Linar Jets (VLJ). Im Verbund mit Voith wurden in der SVA die FuE-Vorhaben „Entwicklung und Optimierung eines tiefgetauchten Waterjets“ (2006 – 2007) und „Propulsion von Schiffen mit tiefgetauchten Waterjets“ (2008 – 2010) durchgeführt [2], [4]. Schwerpunkte der Vorhaben waren die Optimierung des tiefgetauchten Waterjets, die Ermittlung der Freifahrtkennwerte und Kavitationseigenschaften der TWJs, die hydrodynamische Integration der TWJs in den Schiffsentwurf, die Entwicklung der Versuchsmethodik und Prognoseverfahren für Schiffe mit TWJs und die Ermittlung der Propulsionseigenschaften von Schiffen mit TWJs. VOITH erhielt 2012 von der britischen Firma Turbine Transfer Ltd. den ersten Auftrag zur Lieferung von Voith Linear Jets für ein Windfarm Support Vessel (WSV). Die VLJs wurden 2013 durch VOITH entwickelt und gefertigt. In der SVA wurden systematische Versuche [3] und CFD-Berechnungen durchgeführt, um an Hand der Großausführungsmessungen mit dem WSV die Prognosemethoden zu überprüfen.

Themenbezogene Referenzen/Forschungsprojekte
[1] Bohm, M., Jürgens, D.: LINEAR-Jet: A propulsion system for fast ships, PRADS 1998, The Hague, The Netherlands
[2] Heinke, H.-J., Hellwig; K.: Tiefgetauchter Waterjet – Entwicklungsstand und Ausblick, Marineforum 12/2005
[3] Heinke, H.-J.: Latest Hydrodynamic Results of the Voith Linear Jet, 5th Symposium on Voith Schneider Technology 2014, Heidenheim
[4] Jürgens, D., Heinke, H.-J.: Untersuchung tiefgetauchter Waterjets, STG-Hauptversammlung, Hamburg, Jahrbuch der Schiffbautechnischen Gesellschaft, 100. Band, 2006