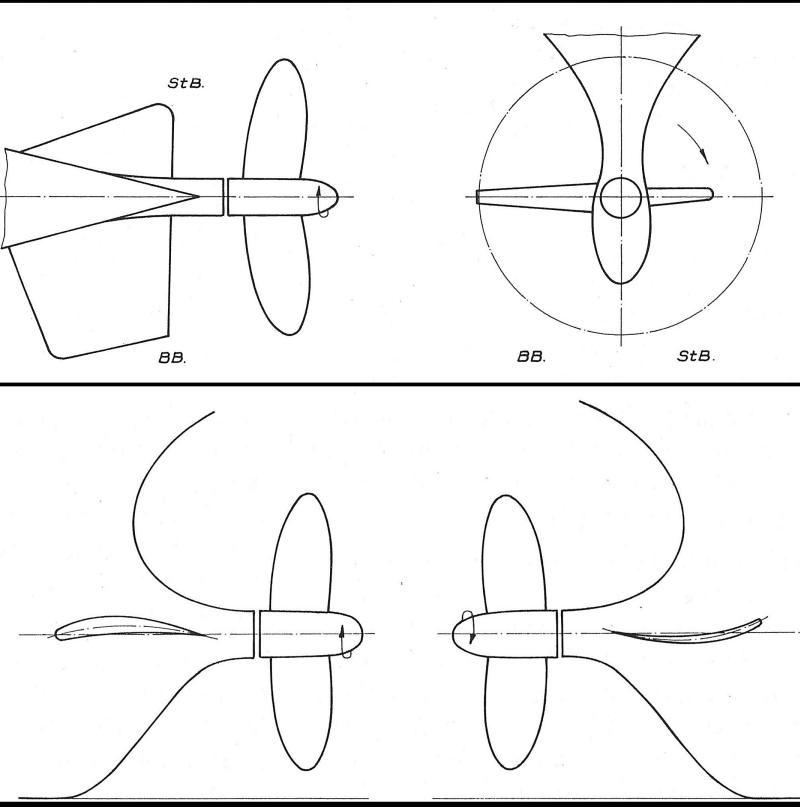
Unter dem Begriff „Energy Saving Device” (ESD) werden die Maßnahmen und Methoden zur Einsparung von Energie im Schiffsbetrieb im Vergleich zum „konventionellen” Schiff zusammengefasst. Energy Saving Devices beinhalten u.a. das Hinterschiff (Heckwulst, asymmetrischen Hinterschiff), den Propeller, Düsen, Leitflossen und das Ruder allein und in Kombination. An der Entwicklung von ESDs wurde bereits in den 70er Jahren gearbeitet. Schwerpunkte waren Untersuchungen über den Einfluss von Heckwülsten auf die Propulsion und die Schwingungserregung, der Entwurf und die Testung von kontrarotierenden und von überlappenden Propellern und die Entwicklung von Zustrom verbessernden Düsen [1], [2], [3]. Asymmetrische Hinterschiffe und Leitflossen wurden im Rahmen der Propulsionsoptimierung der Schiffe für die Erzeugung eines Vordralls in der Propellerzuströmung verwendet, um die Drallverluste des Propellers zu verringern. Die Forschung und Entwicklung in diesem Bereich führte zur SVA Leitflosse. Modellversuche mit unterschiedlichen Schiffstypen und Großausführungsmessungen zeigten ein Potenzial von 2 bis 5 % Leistungseinsparung durch den Einsatz des SVA Leitflossensystems auf [4], [5], [6].
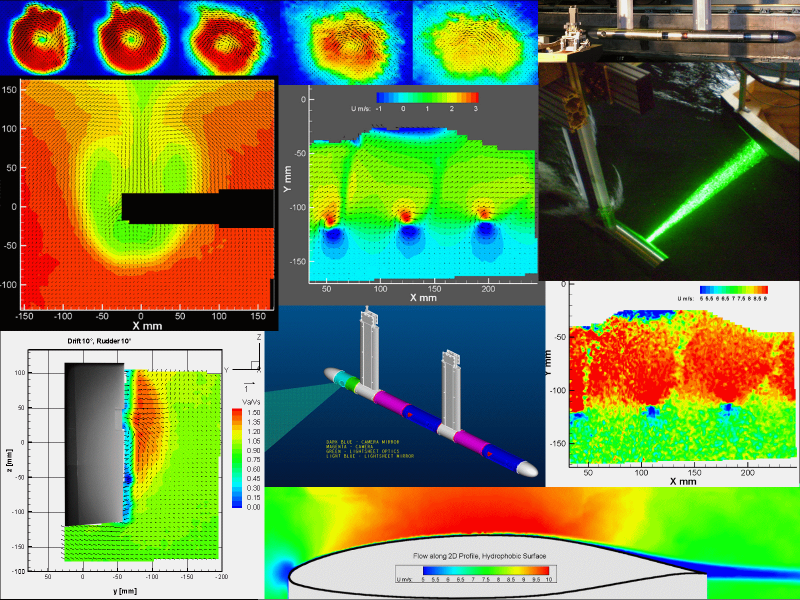
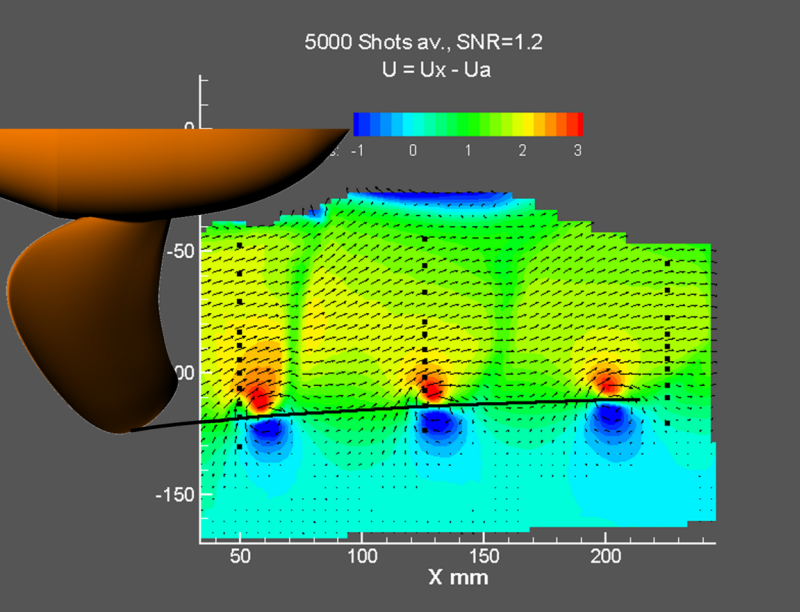
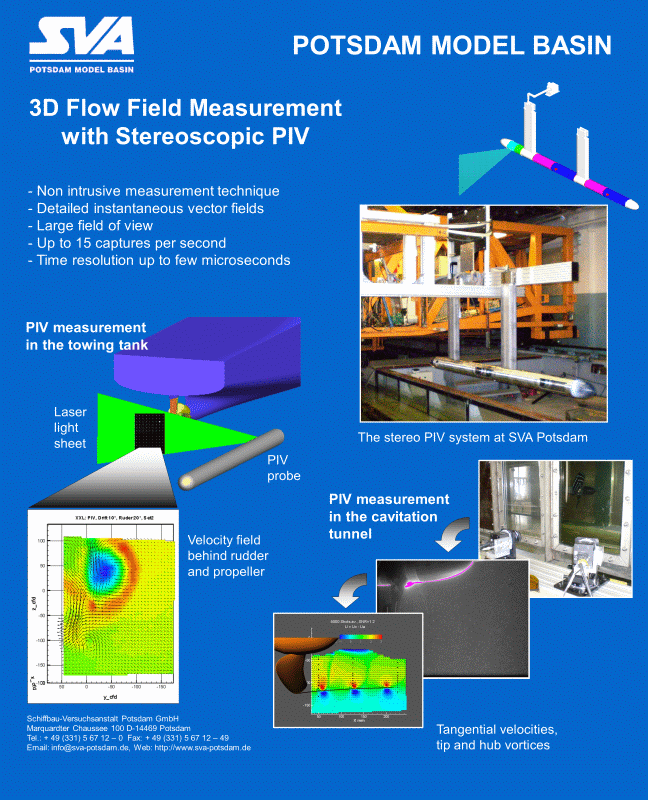
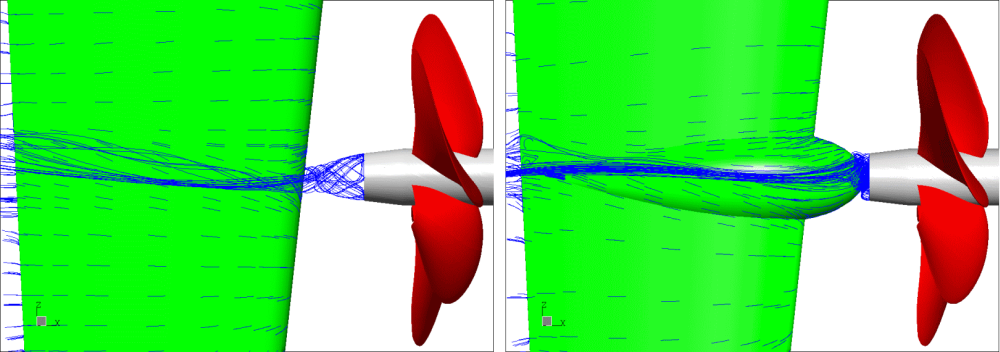
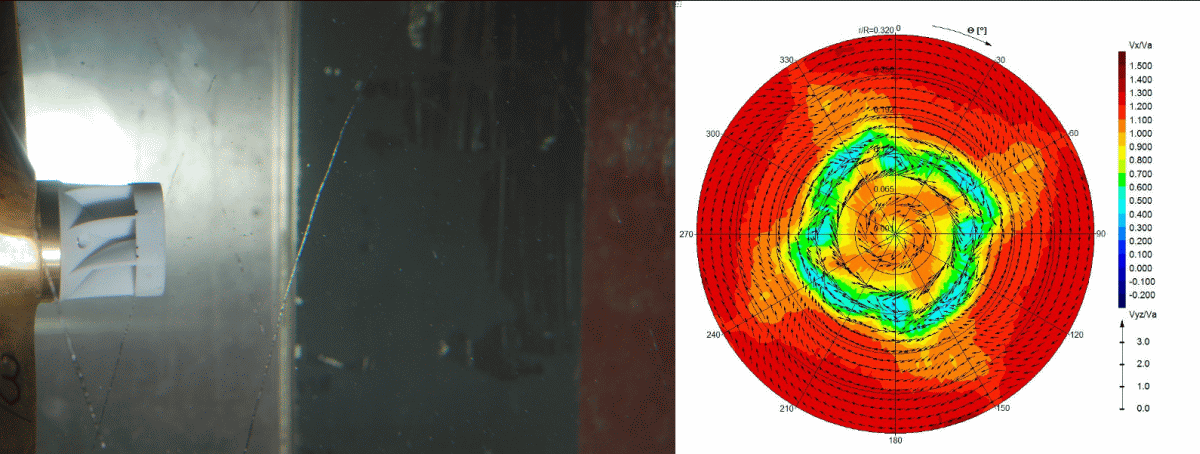
Verschiedene FuE-Vorhaben wurden bearbeitet, um den Entwurf von Propellern und Energy Saving Devices zu verbessern. Potenzialtheoretische Verfahren werden für den Entwurf und die Optimierung von Propellern genutzt. Viskose Berechnungsverfahren und Experimente werden zur Überprüfung des Entwurfes, die Prognose von Maßstabseinflüssen und für den Entwurf und die Optimierung von Propulsionssystemen, wie Düsenpropeller, Thruster und ESDs angewendet. Zur Überprüfung des Entwurfes von Propeller, Nabenkappenflossen und Ruder werden Geschwindigkeitsmessungen durchgeführt. Die von der SVA entwickelte HVV-Ablaufhaube (Hub Vortex Vane) führt zur Reduzierung des Nabenwirbels und verringert die Energieverluste des Propellers im Nabenbereich.
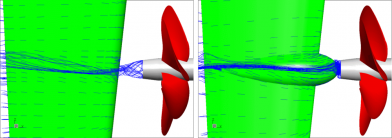
Systematische CFD Berechnungen wurden zur Analyse der Effektivität von Costa Propulsionsbirnen (Costa Bulb) an Rudern und zur Ableitung von Entwurfshinweisen durchgeführt [7]. Diese Arbeiten wurden im FuE-Verbundvorhaben BossCEff – „Steigerung des Propulsionswirkungsgrades und Verminderung der Nabenwirbelkavitation durch eine verbesserte Berücksichtigung der Wechselwirkung zwischen Propellerstrahl und Ablaufhaube“ weitergeführt [8], [9]. In Zusammenarbeit mit den Projektpartnern der Technischen Universität Hamburg-Harburg, Institut für Fluiddynamik und Schiffstheorie (FDS) und der Mecklenburger Metallguss GmbH (MMG) wurden spezielle Propellerablaufkappen für die Anwendung bei Rudern mit Propulsionsbirnen und Propellerablaufhauben mit Flossen entwickelt und untersucht.
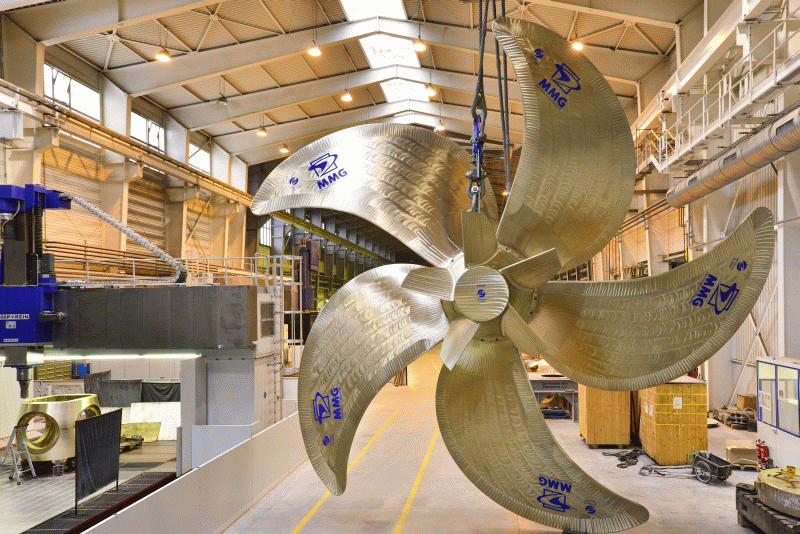
Die Mecklenburger Metallguss GmbH entwickelte in dem Verbundvorhaben BossCEff eine neue energieeinsparende Flügelkappe, die MMG ESCAP®. Die Flügelhaube der MMG verbessert die Propulsionseigenschaften des Schiffes bei existierenden Propellern und bei Propeller Redesign Projekten. Die ESCAP® wird auch bei neu entworfenen Propellern erfolgreich angewendet.
Die folgenden maximalen Leistungseinsparungen konnten in den Untersuchungen der SVA [11], [12] für Schiffe mit Energy Saving Devices erreicht werden:
|
| Twisted Ruder |
bis zu 1,4 % |
| Costa-Propulsionsbirne bei Twisted Rudern |
bis zu 3,7 % |
| Costa-Propulsionsbirne bei herkömmlichen Rudern |
bis zu 3,5 % |
| Nabenkappenflossen |
bis zu 3,2 % |
| Propeller Redesign |
bis zu 14 % |
| Wake Equalising Duct |
bis zu 4,8 % |
| Becker Mewis Duct® |
bis zu 10 % |
| Bugwulst Retro-fit |
bis zu 21 % |
Themenbezogene Referenzen/Forschungsprojekte
[1] Schmidt, D.: Propulsionsuntersuchungen mit Einzelpropeller und Gegenlaufpropeller am Modell eines Containerschiffes, Schiffbauforschung 14 1/2/1975
[2] Schmidt, D.: Der Einfluss der Form des Heckwulstes auf die Schwingungserregung durch den Propeller für ein Containerschiff, Schiffbauforschung 21 1/1982
[3] Schmidt, D.: Die Reduzierung der propellererregten Schwingungen durch nachstrombeeinflussende Änderungen am Hinterschiff,
Schiffbauforschung 23 3/1984
[4] Mewis, F., Peters, H.-E.: Verbesserung der Propulsion durch ein neuartiges Flossensystem Intern. Rostocker Schiffstechnisches Symposium, Schiffbauforschung, Sonderheft, Bd. 1, 1987
[5] Peters, H.-E., Mewis, F.: Das Leitflossensystem der SVA am Containerschiff Typ Saturn, HANSA Nr. 17/18, 1990
[6] Schmidt, D.: Nachrüstung von Motorgüterschiffen ermöglicht Leistungseinsparung, Binnenschiffahrt – ZfB Nr. 9, Sept. 1995
[7] Lübke, L.: Numerical Simulation of the Viscous Flow around Costa Bulbs, NUTTS 2002, Nantes, August 2002
[8] Greitsch, L.; Pfannenschmidt, R., Abdel-Maksoud, M., Druckenbrod, M., Heinke, H.-J.: BossCEff – Steigerung des Propulsionswirkungsgrades durch Reduktion von Nabenwirbelverlusten, Statustagung „Maritime Technologien“, BMWE, Rostock, 10.12.2014
[9] Heinke, H.-J., Lübke, L. O., Steinwand, M.: Numerical and experimental investigations for influencing the propulsion efficiency in the hub region of the propeller, STG-Sprechtag “Hydrodynamic Performance of ESDs”, Hamburg, 09.10.2014
[10] Pfannenschmidt, R., Greitsch, L.: Das MMG Re-Design-Programm, Hanse Sail Business Forum, 07.08.2014
[11] Heinke, H.-J., Lübke, L. O.: Maßnahmen zur Energieeinsparung, Schiff & Hafen, Nr. 10, 2014
[12] Heinke, H.-J., Hellwig-Rieck, K.: Investigation of Scale Effects on Ships with a Wake Equalizing Duct or with Vortex Generator Fins, Second International Symposium on Marine Propulsors, smp’11, Hamburg, Germany, June 2011