Keeping the position of a ship, regardless of sea state, wind and current is called “Dynamic Positioning” (DP). For offshore vessels and platforms DP capabilities are critical to executing their missions at any time. When designing these systems, knowledge of the forces acting on the ship is required in order to interpret or control the DP-drive systems. At SVA Potsdam, these forces are determined with experimental methods and also by mathematical means.
- Wind Forces
- Wave Forces
- Current Forces
Each of these forces is determined seperately and the total resulting force is then calculated by the principle of superpostion.
- Wind forces are calculated using empirical formulas, usually according to Blendermann [1] or Isherwood [2]. The calculation of wind forces can be carried out for any surface vessel.
- The wave forces are calculated with the program system UTHLANDE. These calculations are based on linear strip theory. The drift forces are determined for each given sea state.
- The values for current forces are obtained from the SVA’s extensive database of comparative ships. Moreover, the results come from the SVA research project “Determination of Forces and Moments on The Hull at Angles of Incidence through 360°” into the forecasting methods of SVA.
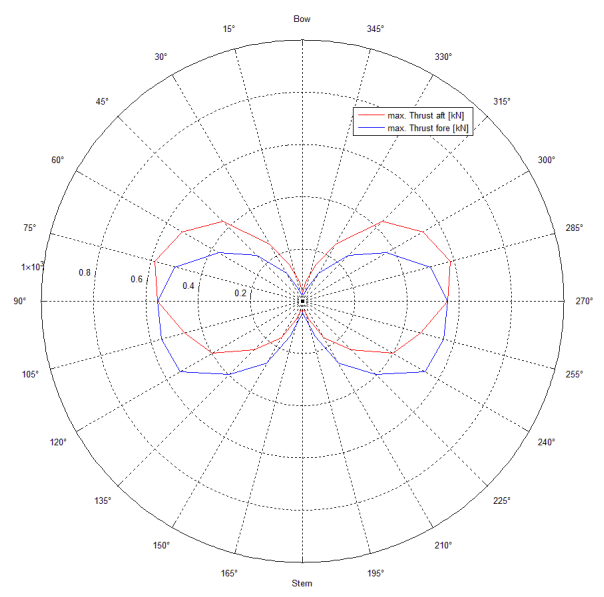
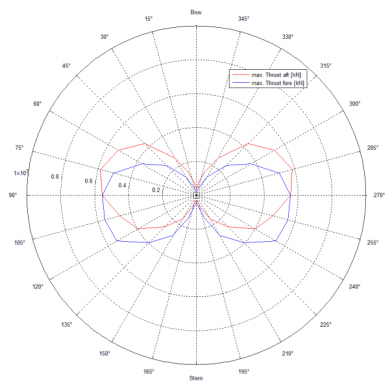
As a result, DP Capability plots come for the various scenarios and environmental conditions studied. The example below shows a single DP Capability Plot for a ship with bow and stern thrusters. The forecasting provides the needed thrusts of the particular thruster, which are necessary for the investigated combination of waves, wind and current to hold the ship in position.
Context Related References / Research Projects
[1] Blendermann, W.: Parameter Identification of Wind Loads on Ships, Journal of Wind Engineering and Industrial Aerodynamics, 51 (1994)
[2] Isherwood: Wind resistance of merchant ships, Royal Inst. of Nav. Arch., 1972
[3] Steinwand, M., Wuttke, H., Schleusener, B.: Prognose quasistationärer Rumpfkräfte anhand von Vergleichsschiffen, numerische Modellierung von Steuer- und Propulsionsorganen und Verifikation simulierter Manöver, Bericht 3735, Schiffbau-Versuchsanstalt Potsdam, November 2010 (Abschlussbericht)
[4] Steinwand, M., Schomburg, E.: 360° – Strömungskräfte auf das Schiff, STG-Sprechtag Manövrieren, 14. Mai 2014, Hamburg
[5] Steinwand, M.: Dynamic Positioning von Schiffen und Plattformen mit Motionstabilisierung unter Verwendung von x/y-Logik, 8. SVA-Forschungsforum, Potsdam, 29. Januar 2015
[6] Steinwand, M.: Forces on Podded Drives in Manoeuvring Condition, SVA-CTO-Meeting, Brieselang, 6. Juni 2015
[7] Steinwand,M.: Bestimmung der Kräfte und Momente auf das Unterwasserschiff über Anströmwinkel von 360°, Bericht 4342, Schiffbau-Versuchsanstalt Potsdam, Juni 2015 (Abschlussbericht)