
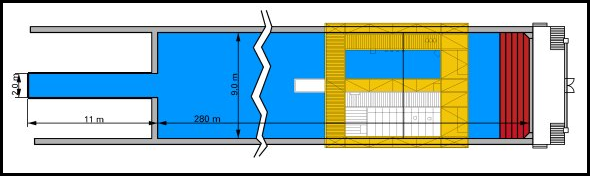
Schlepprinne
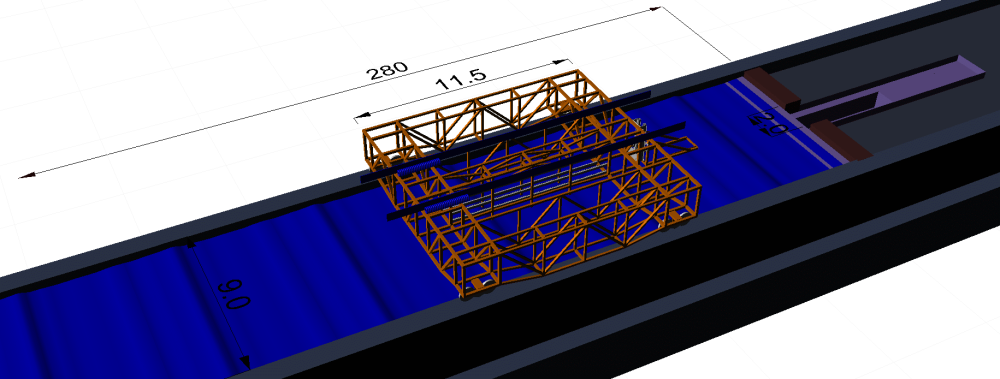
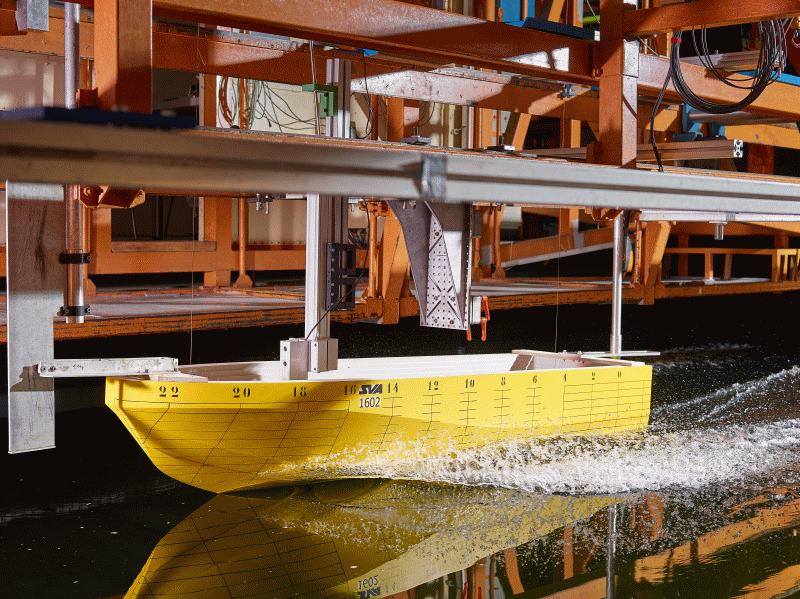
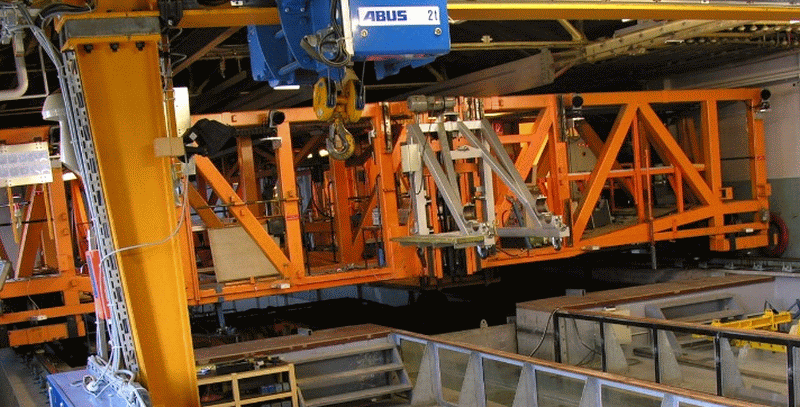
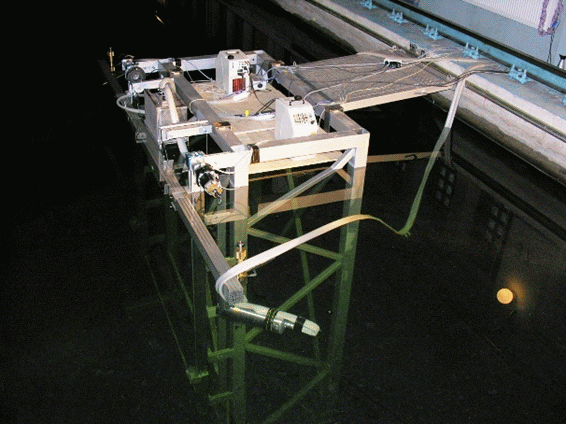
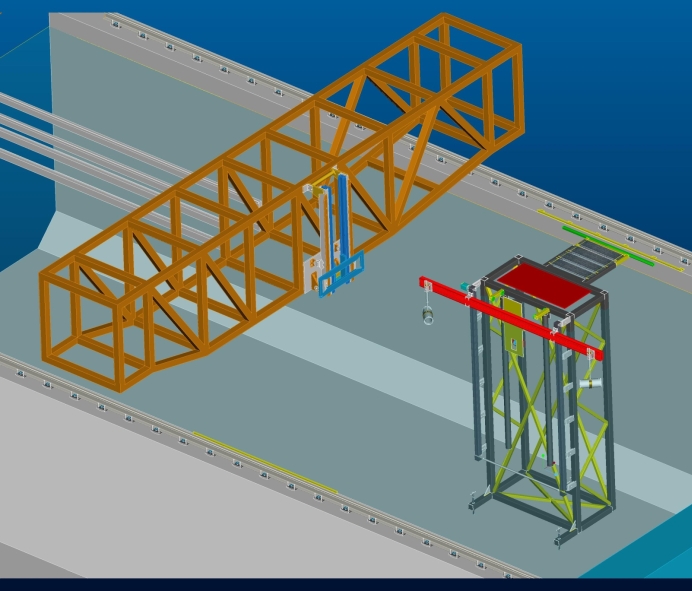
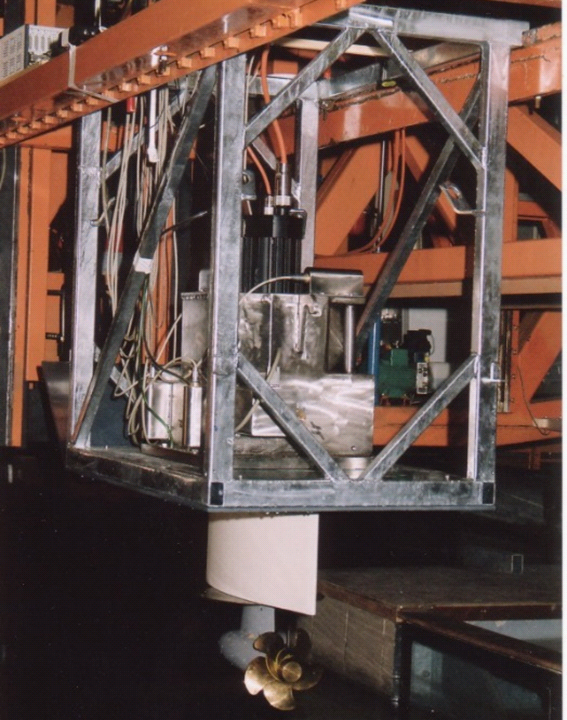
Der Schleppwagen ist mit einem flexiblen Geräteträgersystem versehen, welches alle Geräte und Versuchsaufbauten aufnehmen kann. Der Träger am Heck des Schleppwagens ist hydraulisch stufenlos in der Höhe verstellbar. Dort werden beispielsweise die Freifahrtdynamometer und die U-Boot-Planarmotion-Anlage (SUBPMM) oder das PIV-System installiert. Kameras für das optische Bahnverfolgungssystem von QualiSys und Videokameras sowie Fotoapparate für die Aufzeichnung von Versuchen und Bildern vom Wellensystem vervollständigen die Ausstattung des Schleppwagens.
Technische Daten |
||
| Schlepprinne | ||
| Länge | [m] | 280 |
| Breite | [m] | 9 |
| Tiefe | [m] | 4.5 |
| Schleppwagen | ||
| Max. Wagengeschwindigkeit | [m/s] | 7.5 |
| Genauigkeit Wagengeschwindigkeit | [mm/s] | 0.6 |
| Wellenmaschine | ||
| Max. Wellenhöhe | [m] | 0.3 |
| Wellenarten | regulär, irregulär, Wellenpakete | |
Hauptparameter |
|
| Auflösung Translation | 1 mm |
| Auflösung Rotation | 0.1° |
| Max. Messbereich | 9 m x 35 m |
| Messprinzip | optisch |
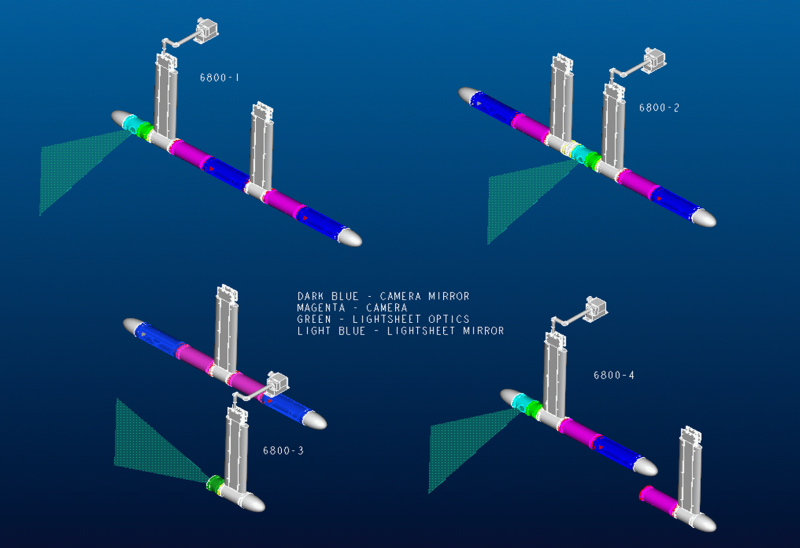
Technische Daten |
|
| Nd:YAG Doppelpulslaser | 190 mJ, max. Frequenz 15 Hz |
| Auflösung CCD-Kameras | 2 Megapixel (1600 x 1200) |
| Farbtiefe/Graustufenauflösung | 12 bit |
| Max. Aufnahmefrequenz | 14.5 Hz |
| Sichtfeldgröße | 100 x 100 bis 800 x 1000 mm2 |
| Anzahl stereoskopische Aufnahmen pro Messung bei 14.5 Hz | 1200 |
| Max. Eintauchtiefe der Sonde | 0.7 m |
| Max. Eintauchtiefe der Einzelkomponenten | 4.5 m |
Hauptparameter |
H29 | H39 | |
| Schub Propeller | Tmax [N] | 400 | 1000 |
| Drehmoment Propeller | Qmax [Nm] | 15 | 55 |
| Propellerdrehzahl | nmax [s-1] | 60 | 60 |
| Max. Neigung Propellerwelle | [°] | 30 | 30 |
Hauptparameter |
R25 | R31 | R73 | R40 | |
| Schub Propeller | Tmax [N] | 100 | 250 | 600 | 150 |
| Drehmoment Propeller | Qmax [Nm] | 4 | 10 | 30 | 6 |
Die Dynamometer ermöglichen die Durchführung der Versuche mit Wellenneigung.
Freifahrtkästen FK1, FK4
Die Freifahrtkästen FK1 und FK4 bieten die Möglichkeit, Freifahrtversuche mit den Innenantriebsdynamometern für Schiffsmodelle durchzuführen. Verwendet werden dafür an den Messbereich angepasste Dynamometer von Kempf & Remmers sowie für den FK4 das Gegenlaufdynamometer R40 von Kempf & Remmers. Die Messwaage für Düsenschub kann an beiden Geräten zusätzlich montiert werden.

Zur Messung von Kräften und Momenten an umströmten Körpern stehen 3-Komponentenwaagen und 6-Komponentenwaagen mit verschiedenen Messbereichen und unterschiedlichen Einsatzgebieten zur Verfügung.Die Waagen R37SR1…6 sind für Freifahrtversuche und für den Einsatz in Modellen geeignet. Die Geräte sind für die Messung von Ruder- und Flossenkräften sowie die Erfassung integraler Kräfte an Thrustern konzipiert. Die Waagen sind mehrheitlich mit einem Drehtisch ausgestattet, mit welchem der Anstellwinkel statisch und dynamisch eingestellt werden kann. Für den Einsatz mit Thrustern werden die Waagen mit einem Antriebsmotor ausgerüstet. Das Gesamtdrehmoment wird mittels eines Drehmomentensensors erfasst.
Die Waage R200 ist für Freifahrtversuche mit großen Antrieben und für allgemeine Kraftmessungen konstruiert. Sie ist zusätzlich mit einem Drehtisch, Antriebsmotor und Drehmomentensensor ausgestattet.
Die Waagen R100, R250 und R350 werden für Kraftmessungen an Schiffen und schwimmenden oder getauchten Strukturen eingesetzt. Sie ermöglichen die Veränderung der Gier-, Trimm- und Krängungswinkel und die Applikation verschiedener Anbindungen.

Technische Spezifikationen 3- & 6-Komponentenwaagen |
||||||||
| Hauptparameter | R37SR 1, 2 | R37SR 3, 4 | R37SR 5, 6 | R200 | R100 | R250 | R300 | |
| Komponenten | 3 | 6 | 3 | 6 | 3 | 6 | 3 | |
| Kräfte | Fmax [N] | 500 | 500 | 1000 | 2000 | 1000 | 2500 | 3500 |
| Drehmoment | Qmax [Nm] | 20 | 20 | 20 | 20 | — | — | — |
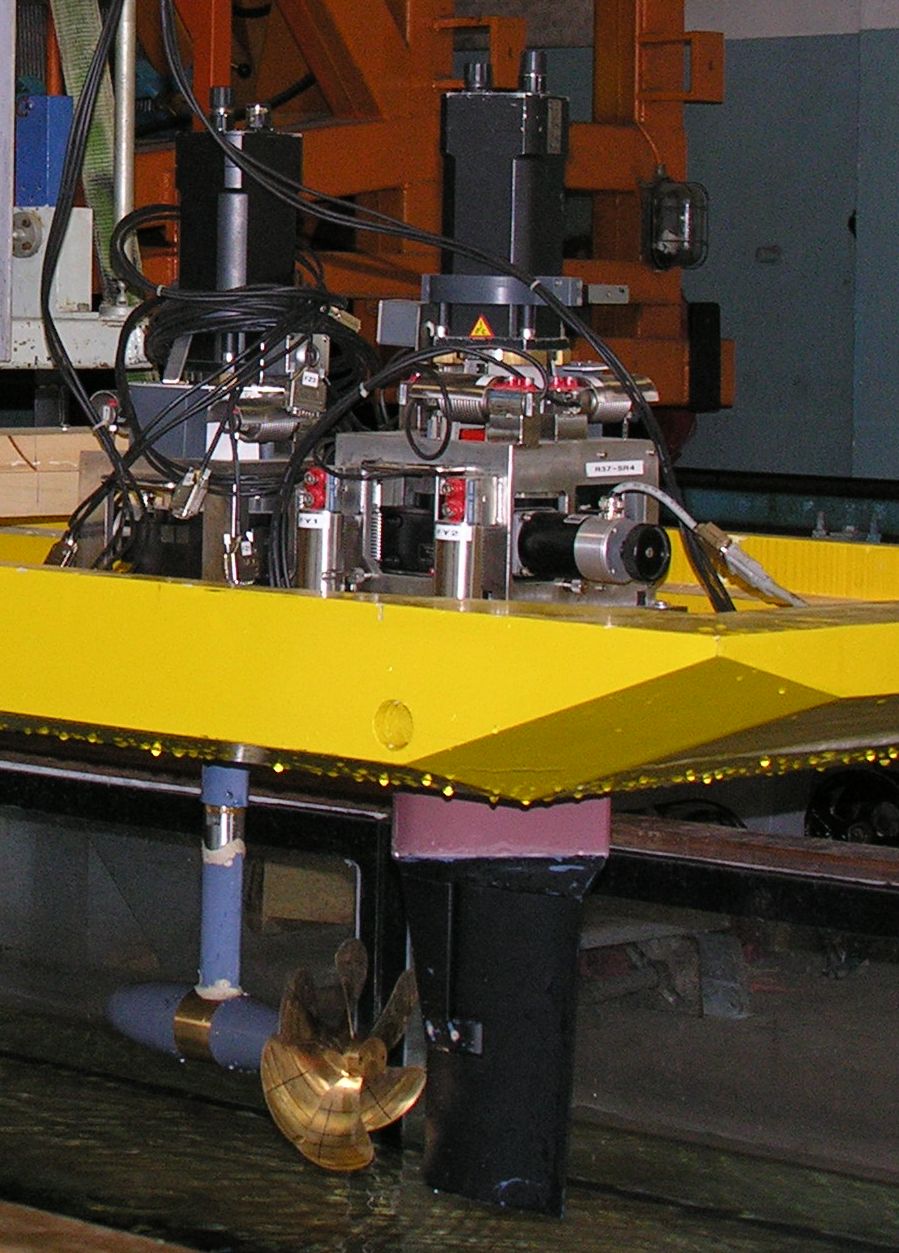
Zur Messung der Kräfte an VSP Antriebe wurden spezielle Messwaagen entwickelt, welche im Vergleich zu den konventionellen VSP-Waagen die Messung von Schubkraft, zwei Seitenkräften sowie dem Antriebsmoment ermöglichen. Die VSP-Waagen können im Schiffsmodell, in der Schlepprinne und im Kavitationstunnel eingesetzt werden.
Technische Daten |
|
| Messung von | |
| Schubkraft | ✓ |
| Seitenkräfte | 2 |
| Drive torque | ✓ |
| Torque | ✓ |
| Max. force component [N] | 200 |
| Max. drive torque [Nm] | 8 |
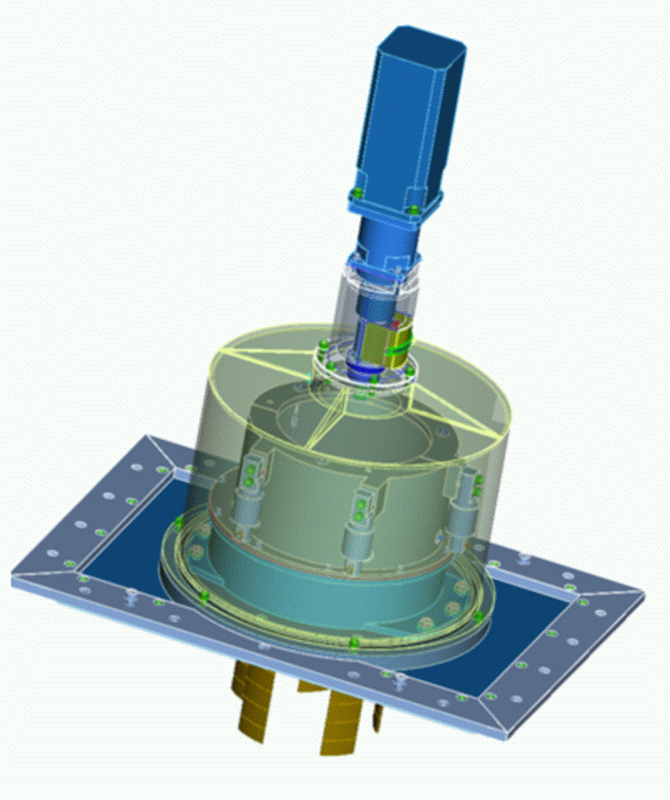
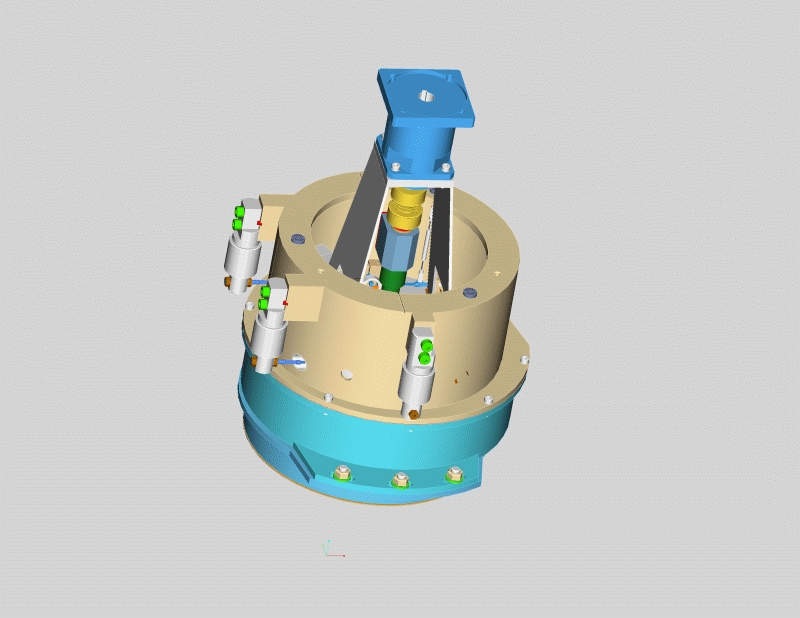
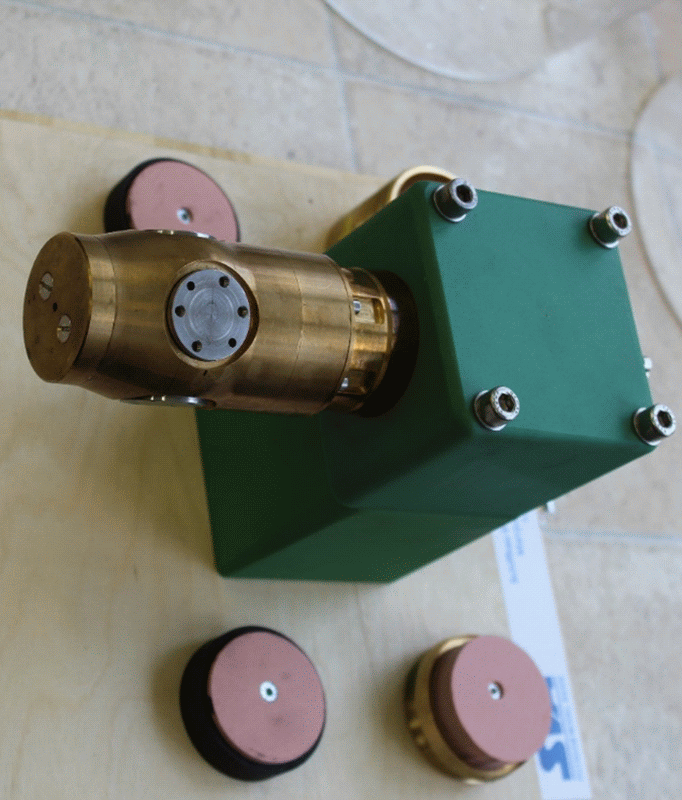
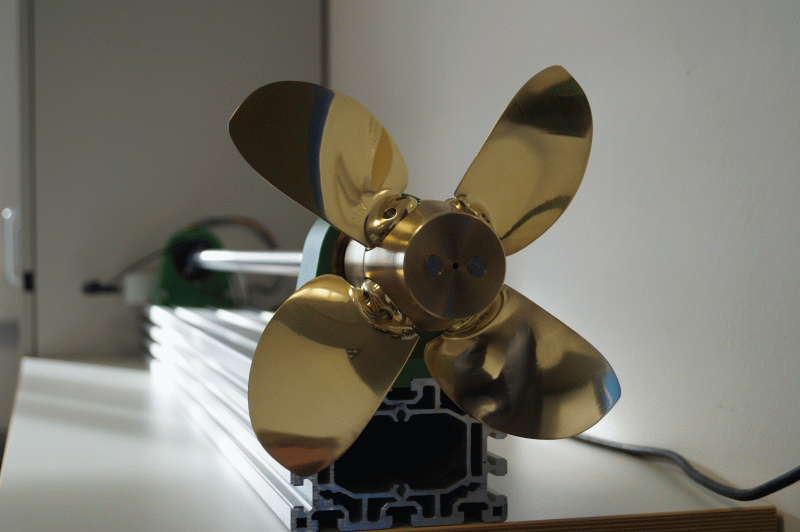
Mit der Flügelverstellnabe ist die dynamische Verstellung der Steigung im Versuch, beispielsweise für Stoppmanöver, möglich. Die Flügelverstellnabe realisiert die Veränderung der Flügelsteigung mit einem Schrittmotor. Es sind 2 Endlagenschalter eingebaut, die den Motor bei ±30° Verstellwinkel abschalten. Die mittlere Steigung ist auf dem Nabenfuß markiert. Gemessen wird der Winkel über ein Potentiometer. Gelagert wird die Nabe in einem Kohlenstoffring. Die Steuerdaten und die Werte des Potis werden über einen Schleifringkörper übertragen.
Hauptparameter |
||
| Nabendurchmesser | mm | 60 |
| Nabenlänge | mm | 57 |
| Flügelzahl | — | 4 |
| Propellerdurchmesser | mm | 250 |
Themenbezogene Referenzen/Forschungsprojekte
[1] Steinwand, M.: Optimierung des Stoppmanövers mit Verstellpropellern und Hybridantrieben, 9. SVA-Forschungsforum, Potsdam, 28. Januar 2016

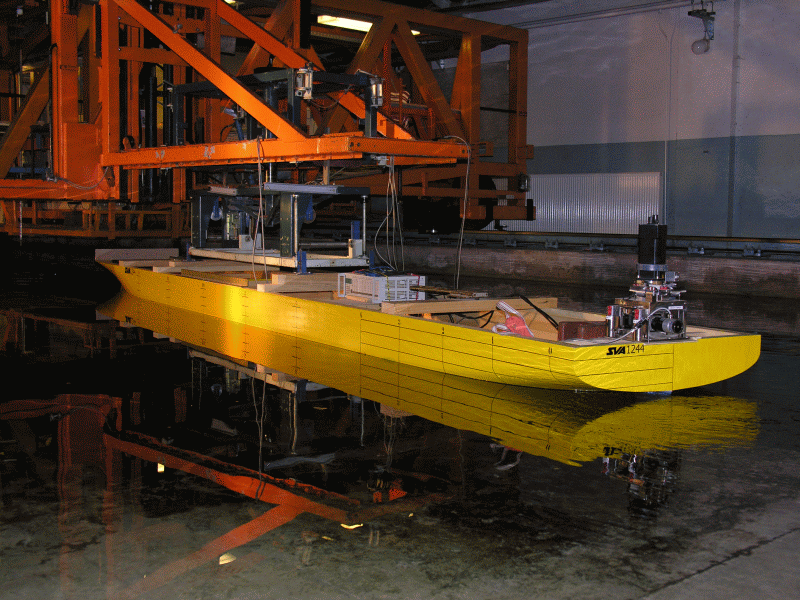
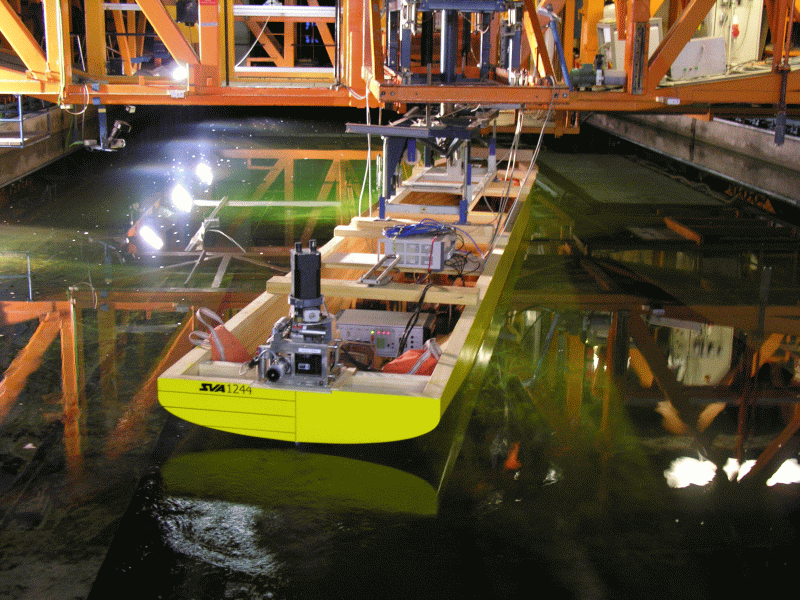
Um diese Problematik experimentell zu untersuchen, wurde in der SVA eine hydraulische Slamminganlage entwickelt. Mit dieser Anlage können Schiffsmodelle mit einer Frequenz bis zu 2.0 Hz und einer Amplitude bis 10 cm zu Stampf-, Tauch- und gekoppelten Bewegungen angeregt werden. Es können Modelle mit einer Länge von 5.5 m und einer bewegten Masse von 500 kg untersucht werden. Durch die Messung von Druckschwankungen im kHz-Bereich an bis zu 30 Messpunkten können örtliche Spitzendrücke identifiziert werden.
Technische Daten |
|
| Max. Frequenz | 2 Hz |
| Max. Amplitude | 0.1 m |
| Max. Modelllänge | 5.5 m |
| Max. Masse | 500 kg |
| Max. # Messpunkte | 30 |
Themenbezogene Referenzen/Forschungsprojekte
[1] Fröhlich, M.: Einsatz eines Schwingungsoszillators auf hydraulischer Basis zur Untersuchung der Slammingbelastung von Schiffen, STG-Sprechtag „Schiffe im Seegang“, Hamburg, Oktober 1998
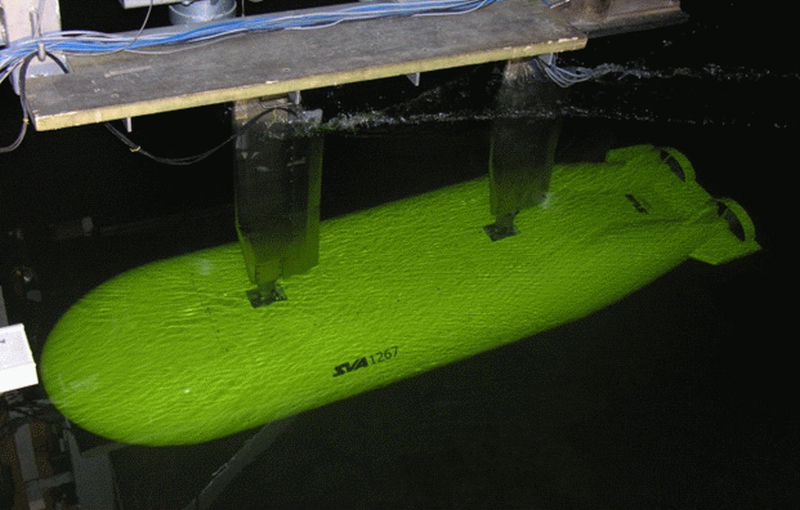
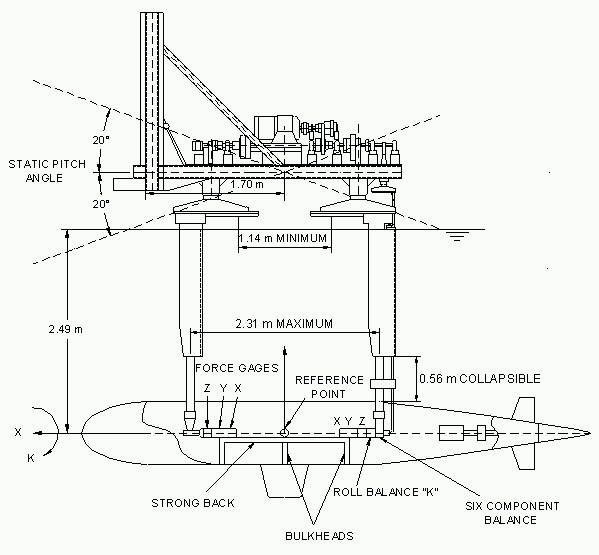
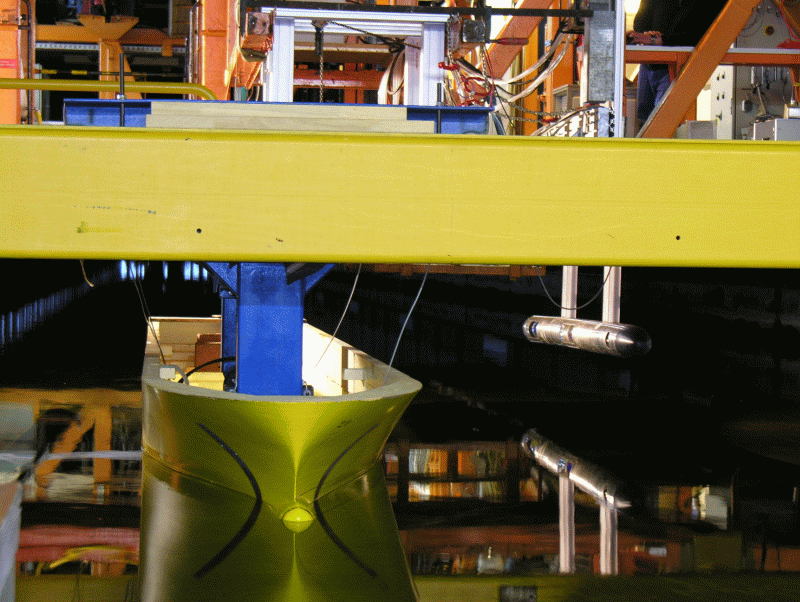
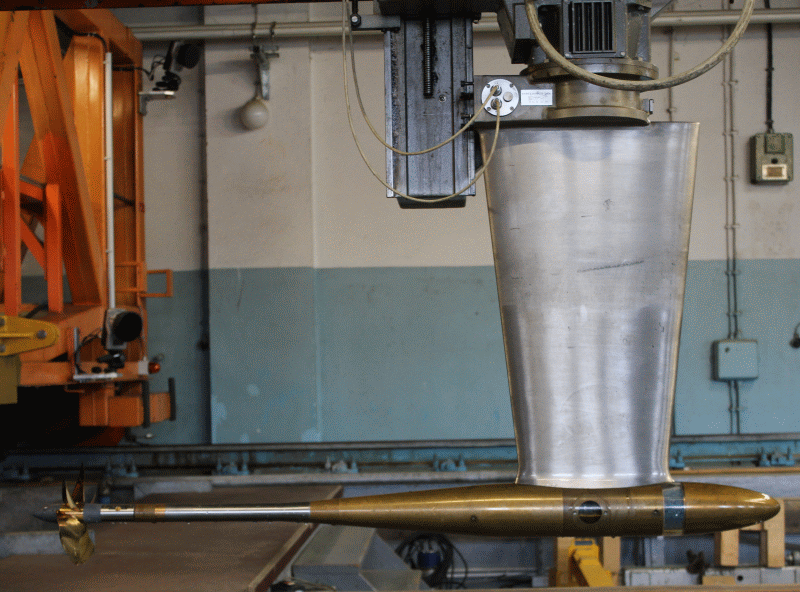
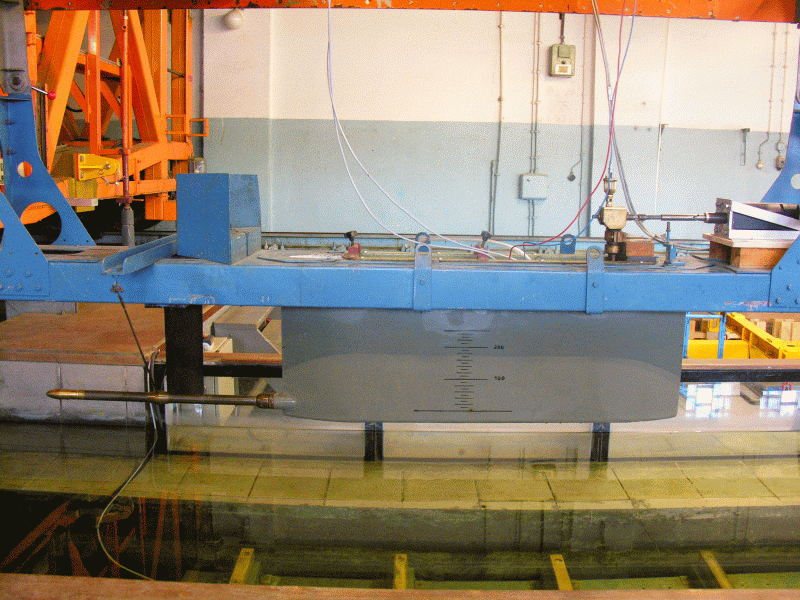
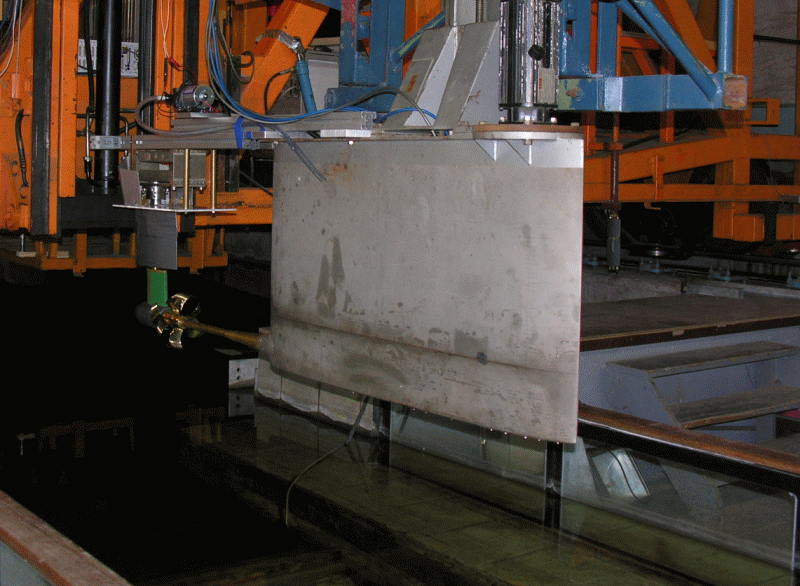
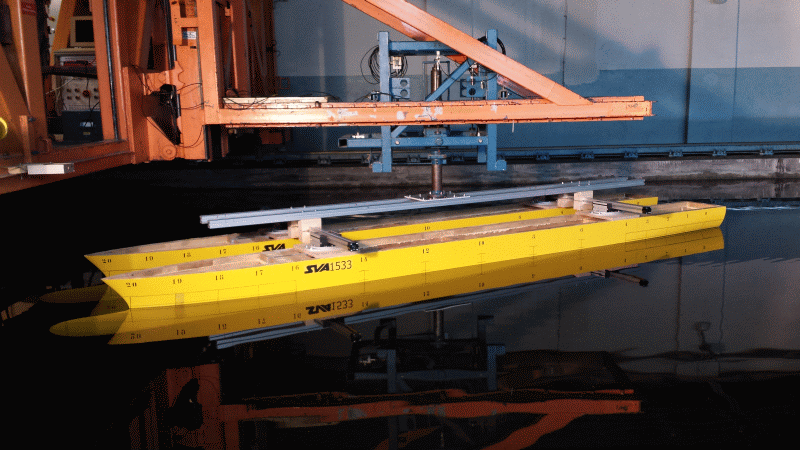
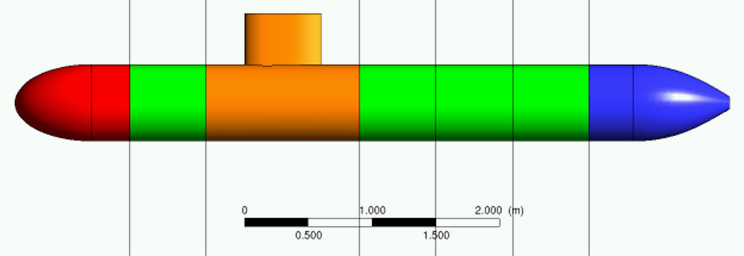
Messungen mit Tauchkörpern werden an Originalen bzw. Kopien in Originalgröße und an maßstabsgetreuen Modellen durchgeführt. Das Spektrum der Versuchsobjekte erstreckt sich von Tauchfahrzeugen, wie ROVs, AUVs über U-Boote bis hin zu speziellen Untersuchungen an Meerestieren und Tauchern. Zur Bestimmung des Bewegungsverhaltens von Unterwasserfahrzeugen in vertikaler und horizontaler Ebene, für Widerstands- und Propulsionsversuche sowie Nachstrommessungen wird das SUBPMM-System (SUBmarine-Planar-Motion-Mechanismus) verwendet. Die Besonderheit der Anlage besteht darin, dass die Messstellen der Kräfte innerhalb des Modells angebracht sind und damit die Einflüsse der Schleppvorrichtung eliminiert werden. Die Anlage ist für Modellgrößen von 1 – 6 m und Tauchtiefen von 0.5 – 2.5 m einsetzbar. Für den Antrieb der Modelle stehen gekapselte Motor-Dynamometer-Module verschiedener Größe zur Auswahl.Für die Bestimmung des Bewegungsverhaltens von Unterwasserfahrzeugen kann mit der SUBPMM-Anlage der einfachen Schleppbewegung des Modells eine Bewegung in einer weiteren Ebene überlagert werden. Zudem kann der Anstellwinkel des Modells als auch der Steuerorgane variiert werden. Somit ist es möglich, die Koeffizienten für die Bewegungsgleichungen zu ermitteln.
Die SUBPMM-Anlage wird darüber hinaus für Widerstands- und Propulsionsversuche verwendet. Für Nachstrommessungen wird ein Rechen mit Drucksensoren eingesetzt, der automatisch verstellbar ist.
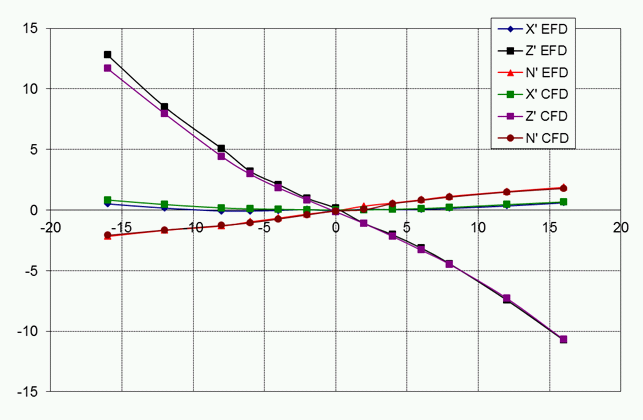
In den FuE-Vorhaben, „Maßstabseffekte bei der Bestimmung des Manövrierverhaltens von Unterwasserfahrzeugen durch Modellversuche“ [3], „Korrelation des Widerstandes getauchter Körper“ [1], „Interferenzerscheinungen bei Substrukturen von getauchten Körpern“ [2] und „Einfluss der Reynoldszahl auf die Sogziffer“ [4] erfolgten Geosim-Versuche und Berechnungen für Unterwasserfahrzeuge zum Bewegungsverhalten, Widerstand und Interferenzerscheinungen. Die Ergebnisse dieser Untersuchungen sind in die Korrelation für die Großausführungsprognosen eingeflossen.
Themenbezogene Referenzen/Forschungsprojekte
[1] Grabert, R., Rieck, K.: Skalierung von Widerstandsversuchen mit U-Booten, VSM(2007)
[2] Nietzschmann, T.: Interferenzerscheinungen bei Substrukturen von getauchten Körpern”, FuE-Sachbericht (2012)
[3] Steinwand, M.: Maßstabseffekte bei der Bestimmung des Manövrierverhaltens von Unterwasserfahrzeugen durch Modellversuche, 2. SVA-Forschungsforum, Potsdam, 29. Januar 2009
[4] Hellwig-Rieck, K.: Einfluss der Reynoldszahl auf die Sogziffer, 4. SVA-Forschungsforum, Potsdam, 27. Januar 2011